DWS
需求调研初版
自动测量及称重项目方案
多相机立体视觉系统
激光线扫描系统
结构光3D扫描系统
多传感器融合系统
摄影测量系统
移动测量机器人系统
毫米波雷达多机联合定位系统
光纤传感器阵列系统
激光跟踪仪多机联合系统
高精度局域光学三维测量系统
本文档使用 MrDoc 发布
-
+
首页
多传感器融合系统
## 多传感器融合系统 >i **信息提示** > > **目的:测量2m2m2.5m的大体积物体,精度±10mm** #### 系统组成: * 激光线扫描仪:1-2台 * 立体视觉相机系统:2-4台 * 惯性测量单元(IMU):用于姿态监测 * 数据融合处理单元:集成多传感器数据 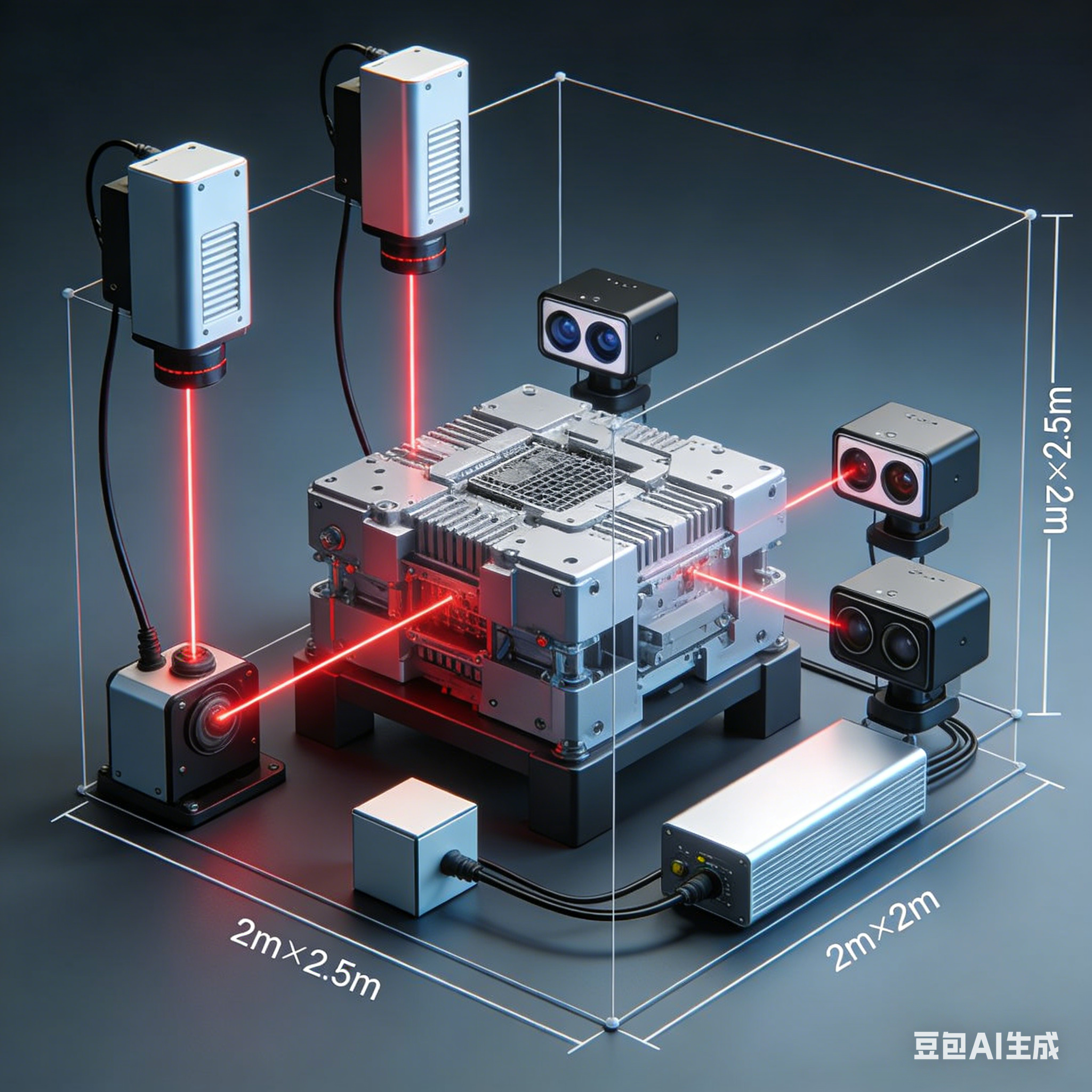 #### 工作原理: >i **信息提示** > > 结合**激光三角测量和立体视觉**的优势,通过多模态数据融合算法,提高整体测量精度和鲁棒性。系统采用特征级融合策略,提取各传感器特征后进行融合。 #### 精度保障: * 激光扫描提供高精度局部数据 * 立体视觉提供全局结构信息 * 通过误差补偿算法,将系统误差控制在±5mm以内 * 采用自适应加权融合,根据距离自动调整各传感器权重 #### 实施要点: * 传感器标定:确保各传感器坐标系统一 * 数据同步:高精度时间同步,减少运动误差 * 融合算法:设计合理的融合策略,避免数据冲突 #### 优势: * 提高系统鲁棒性,单一传感器失效不影响整体 * 在复杂环境(如光照变化)下保持稳定性能 * 信息互补,提升测量精度和完整性
admin
2026年4月3日 14:32
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码