DWS
需求调研初版
自动测量及称重项目方案
多相机立体视觉系统
激光线扫描系统
结构光3D扫描系统
多传感器融合系统
摄影测量系统
移动测量机器人系统
毫米波雷达多机联合定位系统
光纤传感器阵列系统
激光跟踪仪多机联合系统
高精度局域光学三维测量系统
本文档使用 MrDoc 发布
-
+
首页
毫米波雷达多机联合定位系统
## 毫米波雷达多机联合定位系统 >i **信息提示** > > **目的:测量2m2m2.5m的大体积物体,精度±10mm** #### 系统组成: * 毫米波雷达:3-4台(如77GHz毫米波雷达) * 数据处理单元:用于点云数据处理 * 多机联合定位系统:实现多雷达数据融合 * 数据处理工作站 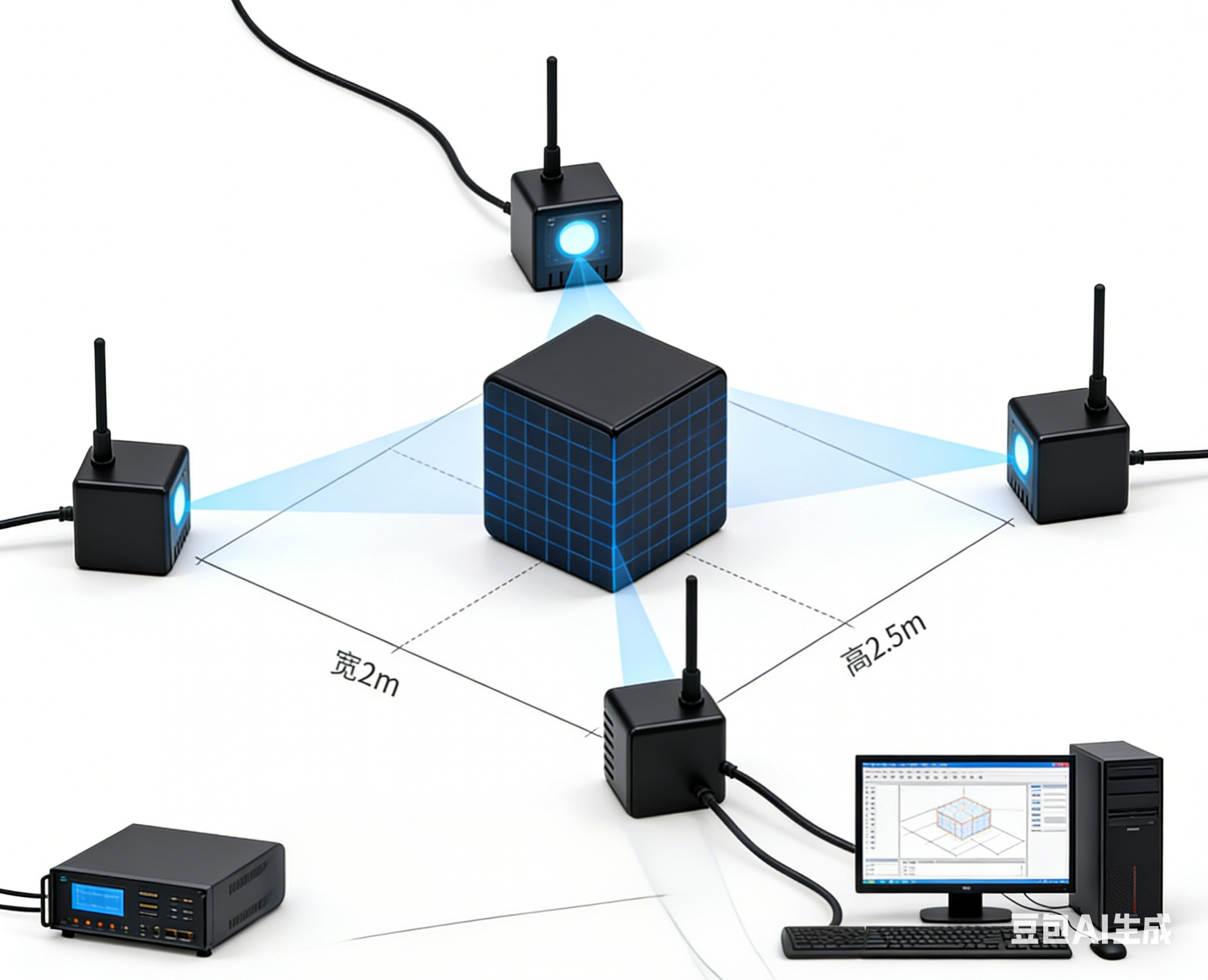 #### 工作原理: >i **信息提示** > > 通过多台毫米波雷达协同工作,利用**CZT和相位差法的测距值精化算法**,以及**顾及单次观测雷达脉冲测量精度差异和先验距离的多机联合定位算法**,实现高精度定位测量。 #### 精度保障: * X方向精度在1~3mm之间,Y方向精度在1.5mm以内,综合平面精度可稳定在3mm左右 * Z方向精度相对较差,在6~12mm之间,但通过优化网形可进一步提升 * 对于2.5m物体,系统精度完全满足±10mm要求,实际精度可达±3mm #### 实施要点: * 雷达布置:合理布置雷达位置,优化测量网形 * 信号处理:选择采样频率6.25MHz、采样点数1024点的参数组合为最佳 * 数据融合:采用多机联合定位算法,有效提升测量精度 #### 优势: * 适用于复杂环境下的测量,如隧道等特殊场景 * 抗干扰能力强,X方向精度提升49.7%,Y方向提升55.3% * 可探测微小形变,对毫米级的形变仍然较为敏感、
admin
2026年4月3日 14:48
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码